Projects
Outlining my non-published projects here. My research work can be seen here.
-
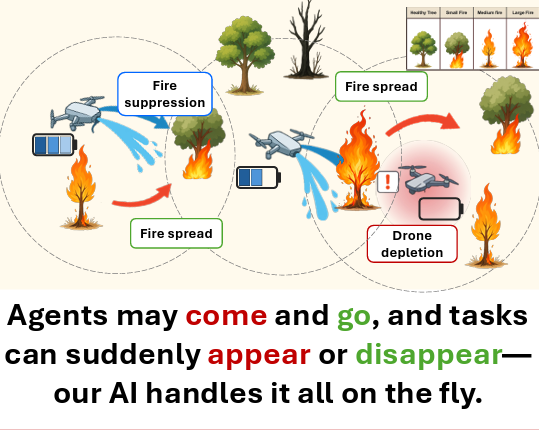 Adaptive learning for Open Agent Systems - Winner of MOASEI 2025 (Team Markov Mayhem): Trained GNN-based RL agents capable of adapting to open environments and changes without relying on direct communication or a central controller. We focus on a wildfire scenario where robots with limited resources collaborate to extinguish randomly appearing and spreading fires.
Adaptive learning for Open Agent Systems - Winner of MOASEI 2025 (Team Markov Mayhem): Trained GNN-based RL agents capable of adapting to open environments and changes without relying on direct communication or a central controller. We focus on a wildfire scenario where robots with limited resources collaborate to extinguish randomly appearing and spreading fires. -
.png) Emergent Behaviour in Swarm Robots - HeRo+: Initiated a pilot program building real swarm robots and unified a comprehensive research methodology for analyzing swarm robot interactions, leading to the discovery of novel behaviors that accelerated collaborative tasks.
Emergent Behaviour in Swarm Robots - HeRo+: Initiated a pilot program building real swarm robots and unified a comprehensive research methodology for analyzing swarm robot interactions, leading to the discovery of novel behaviors that accelerated collaborative tasks. -
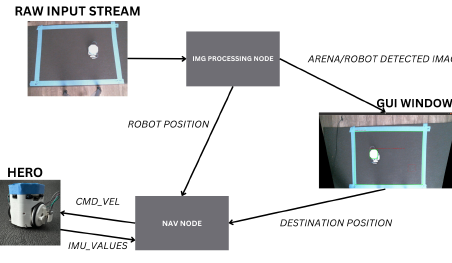 Localization and control of 3D printed autonomous robots: Revised a real-time localization system that utilized camera data, improving localization accuracy in expansive environments, enabling precise navigation for swarm robotics applications. (report).
Localization and control of 3D printed autonomous robots: Revised a real-time localization system that utilized camera data, improving localization accuracy in expansive environments, enabling precise navigation for swarm robotics applications. (report). -
 Motion Planning collision - Multi-Agent Path Plans (MAPF): Deployed a multi-agent path planning software that facilitated collision-free navigation for 50+ robotic agents, enhancing operational efficiency.
Motion Planning collision - Multi-Agent Path Plans (MAPF): Deployed a multi-agent path planning software that facilitated collision-free navigation for 50+ robotic agents, enhancing operational efficiency. -
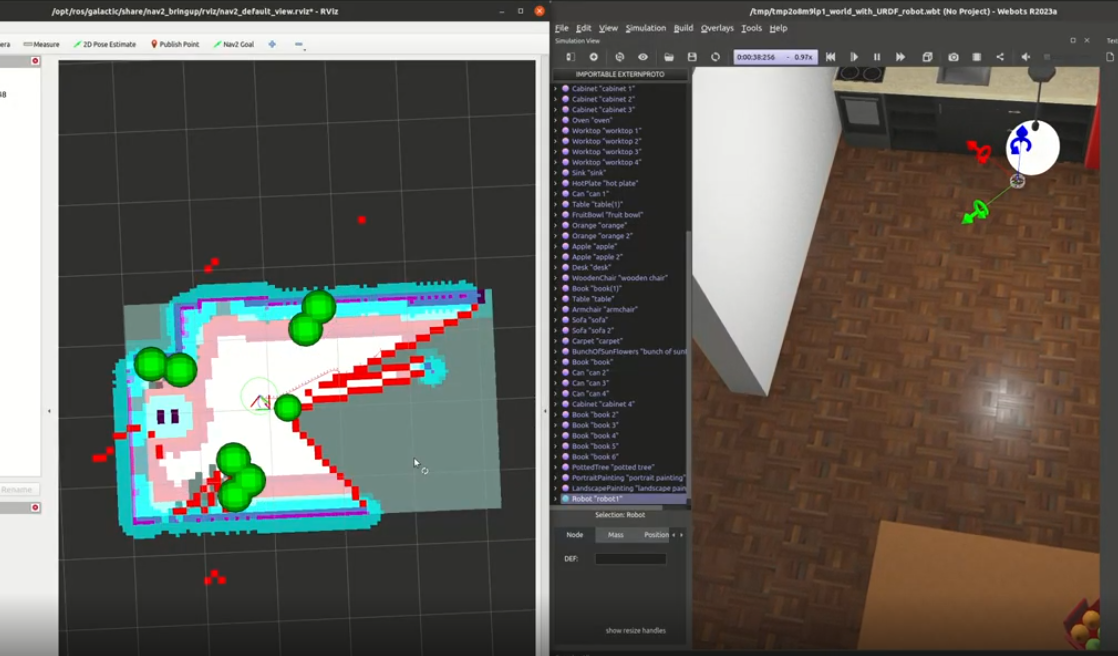 SLAM using Crazyflie: Teamed and implemented the integration of Nav2 with ROS2 on the Crazyflie drone. Created and tested a comprehensive simulation environment to assess the drone's mapping capabilities.
SLAM using Crazyflie: Teamed and implemented the integration of Nav2 with ROS2 on the Crazyflie drone. Created and tested a comprehensive simulation environment to assess the drone's mapping capabilities. -
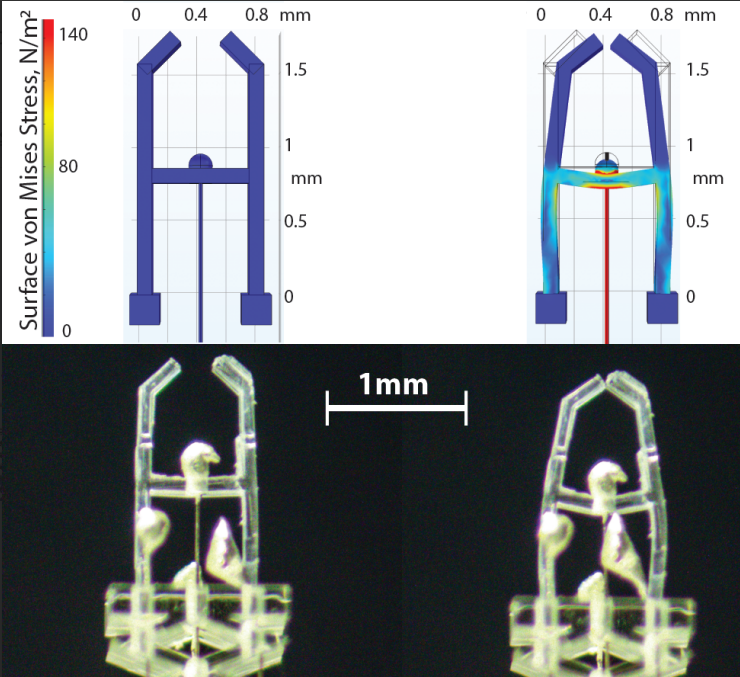 Design of a micro robotic continuum gripper for medical applications: Lead and created a groundbreaking micro robotic gripper prototype for minimally invasive surgeries, reducing average surgery time and 40% reduction in recovery time for patients.
Design of a micro robotic continuum gripper for medical applications: Lead and created a groundbreaking micro robotic gripper prototype for minimally invasive surgeries, reducing average surgery time and 40% reduction in recovery time for patients.