Published Research
I am particularly interested in developing methods that enable groups of embodied robots to coordinate and adapt.
I aim to advance the broader vision of AI for embodied robots, systems that seamlessly integrate learning, perception, and control to operate in complex real-world environments.
Selected Papers
-
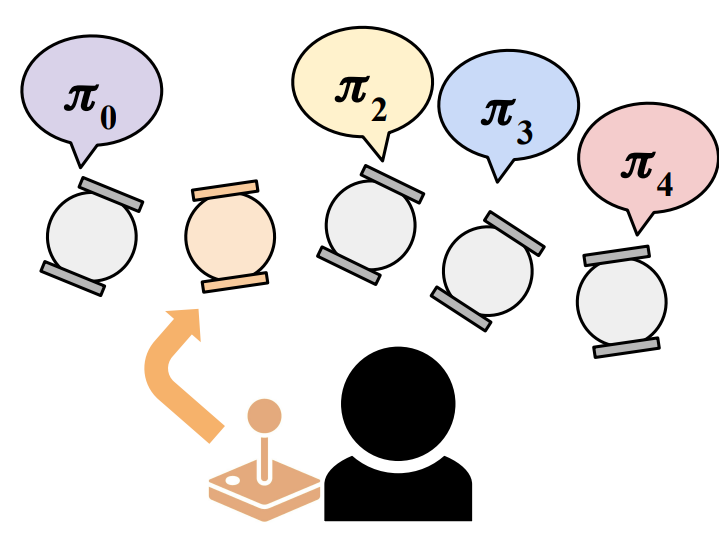 (New) R2BC: Multi-Agent Imitation Learning from Single-Agent Demonstrations
(New) R2BC: Multi-Agent Imitation Learning from Single-Agent Demonstrations
Connor Mattson, Varun Raveendra, Ellen Novoseller, Nicholas Waytowich, Vernon J. Lawhern, Daniel S. Brown
ICRA 2026 -
.jpg) Discovery and Deployment of Emergent Robot Swarm Behaviors via Representation Learning and Real2Sim2Real Transfer
Discovery and Deployment of Emergent Robot Swarm Behaviors via Representation Learning and Real2Sim2Real Transfer
Connor Mattson, Varun Raveendra, Ricardo Vega, Cameron Nowzari, Daniel S. Drew, Daniel S. Brown
AAMAS 2025
Other Papers
-
 (2).jpg) Emergent Swarm Behavior Prediction using 1D-Convolution for Autonomous Closed-Loop Behavior Control
Emergent Swarm Behavior Prediction using 1D-Convolution for Autonomous Closed-Loop Behavior Control
Varun Raveendra, Connor Mattson, Daniel S. Brown
ARMS 2025 Workshop @ AAMAS 2025 -
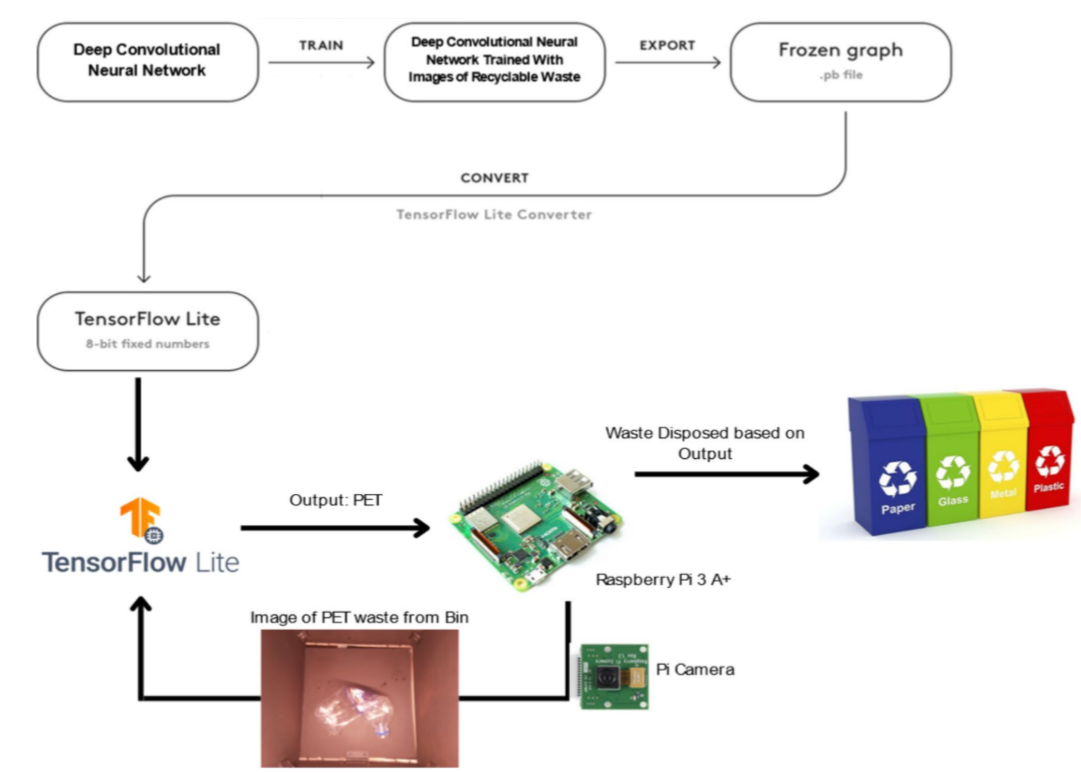 Waste management in urban localities: an IoT and machine learning solution
Waste management in urban localities: an IoT and machine learning solution
V. Viswanatha, Rony Joseph Theckeveetil, Varun Raveendra, Sreeteja Tummala, K. M. Suhas
IJSAEM 2025